Experience
2022-now
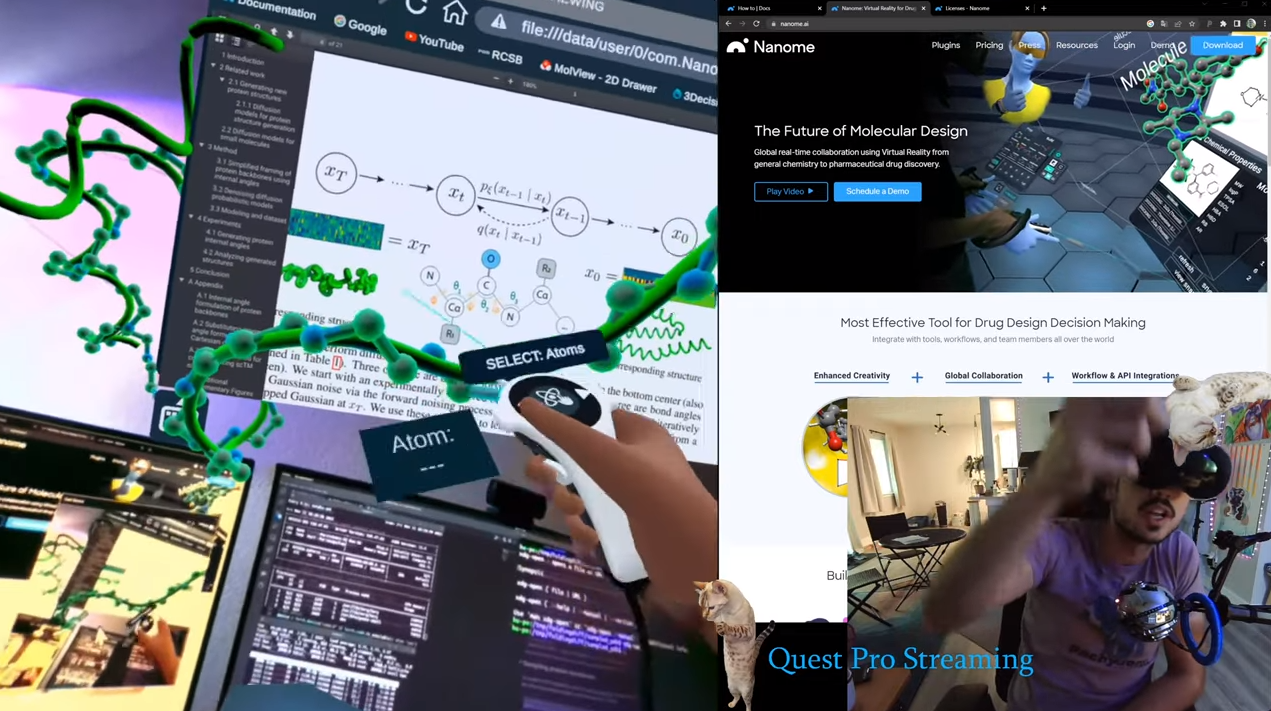
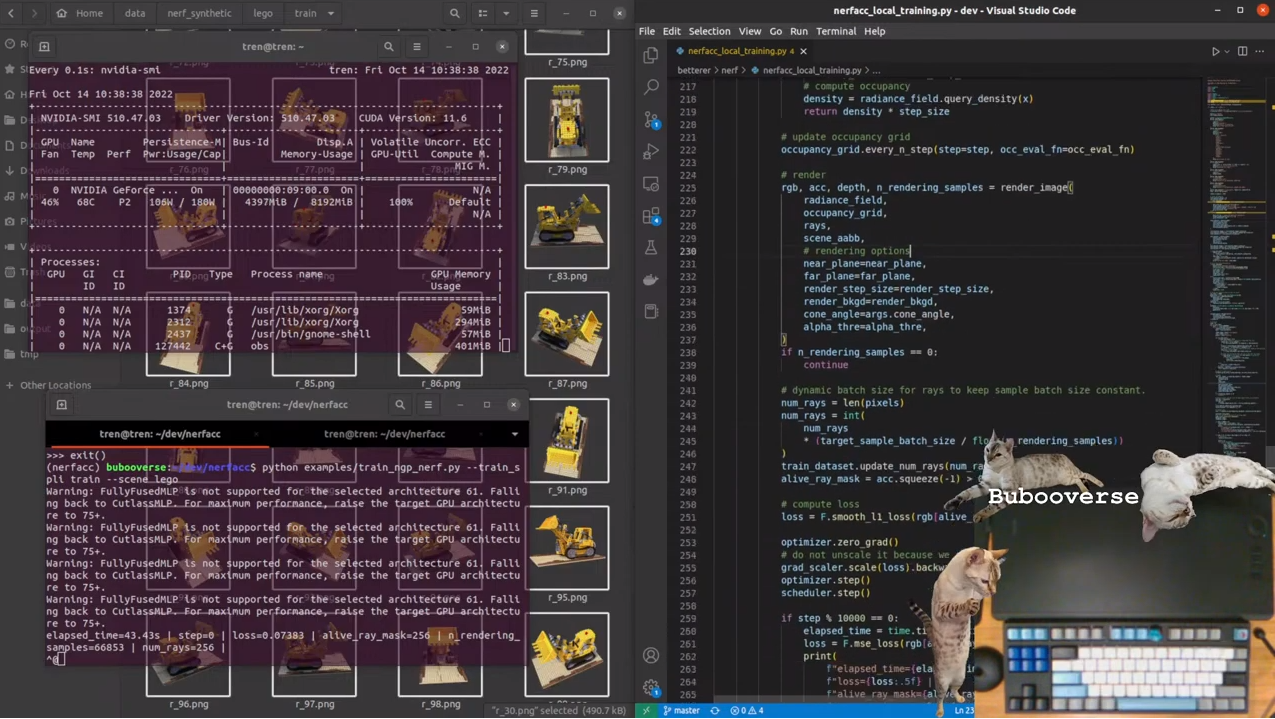
Founded hu-po, a technical consulting and content studio. I work across AI/ML, robotics, XR, and developer tooling, with livestreams focused on coding and paper reading. Recent work includes diffusion models, LLM workflows, LoRAs, quantization, RAG, humanoid agents, Gaussian splats, speech-to-text systems, OpenAI API projects, and open-source alternatives.
2022
Led development on the W&B Sweeps product, a popular hyperparameter tuning framework for machine learning research. Shipped production code in Python, Go, TypeScript, Docker, AWS, GCP, and SQL.
2019
Co-founded a machine learning software company focused on synthetic data for computer vision. Went through Y Combinator during the COVID-19 pandemic, raised $1.3M, directed the product roadmap, and managed a team of 10. Stack: Python, PyTorch, Unity, C#, Docker, Kubernetes, AWS, and GCP.
2018
Designed, trained, and analyzed reinforcement learning agents deployed on low-cost robot manipulators and quadrupeds using TensorFlow, JAX, and MuJoCo. Contributed to two publications during the one-year residency program.
2016
First robotics hire at OSARO. Built early versions of robot software infrastructure, camera and vision sensor integrations, object detection and pose estimation pipelines, robot motion control, planning, simulation environments, and data collection workflows.
2014
Owned the system layout and robotic path-planning map for a prototype robotic warehouse from initial concepts through production. Improved warehouse throughput through simulation analysis and real-time data using SQL and Python. Helped organize and judge the Amazon Picking Challenges in 2015 and 2016.
2011
Graduated from Carnegie Mellon with an M.S. in Robotics and B.S. degrees in Physics and Mechanical Engineering. First-author publications on control theory and 3D structured light sensors. Tools included C++, Linux, MATLAB, and Python.